Ghid pentru utilizarea PIC16F877A pentru proiecte cu motor pas cu pas
Microcontrolerul PIC16F877A este utilizat pe scară largă în multe proiecte electronice, deoarece oferă un echilibru bun de caracteristici și ușurință de utilizare.În acest ghid, vom arunca o privire atentă asupra PIC16F877A, care acoperă totul, de la modelele sale PINOUT și CAD până la utilizarea sa în controlul motoarelor pas cu pas.Indiferent dacă construiți un dispozitiv simplu sau un proiect de automatizare complex, înțelegerea modului de conectare și control a motoarelor folosind acest microcontroller vă va ajuta să obțineți cele mai bune rezultate.
Catalog

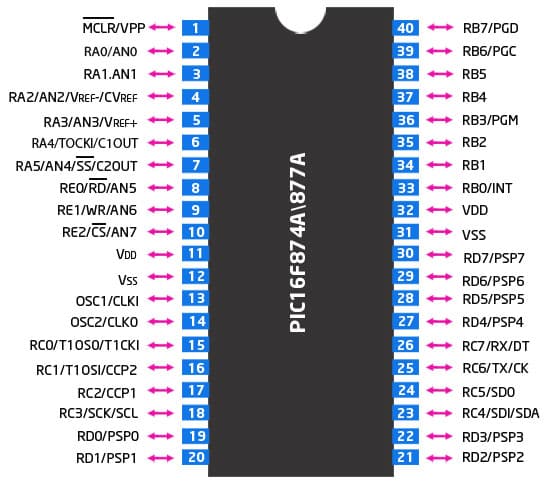
PIC16F877A Configurare pin
Modele CAD pentru PIC16F877A
Pic16f877a Simbol al diagramei
PIC16F877A Amprentă PCB

Model 3D
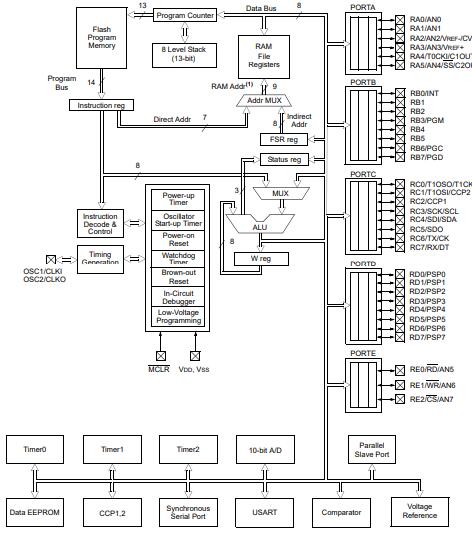
PIC16F877A Structura internă
Specificații tehnice detaliate
| Tip | Parametru |
| Timp de conducere din fabrică | 7 săptămâni |
| Munte | Prin gaură |
| Tip de montare | Prin gaură |
| Pachet / carcasă | 40-DIP (0,600, 15,24mm) |
| Numărul de pini | 40 |
| Converter de date | A/D 8x10B |
| Numărul de I/OS | 33 |
| Cronometre de pază | Da |
| Temperatura de funcționare | -40°C ~ 85°C ta |
| Ambalaj | Tub |
| Serie | Pic® 16f |
| Publicat | 1997 |
| Cod JESD-609 | E3 |
| Cod PBFree | Da |
| Starea părții | Activ |
| Nivel de sensibilitate la umiditate (MSL) | 1 (nelimitat) |
| Numărul de terminații | 40 |
| Cod ECCN | Ureche99 |
| Finisaj terminal | Matte Tin (SN) - ANCELAT |
| Caracteristică suplimentară | Funcționează la aprovizionarea minimă de 4V |
| Poziția terminală | DUAL |
| Tensiune de alimentare | 5V |
| Frecvenţă | 20MHz |
| Numărul piesei de bază | PIC16F877A |
| Număr de pini | 40 |
| Tensiunea de alimentare-max (vsup) | 5.5V |
| Surse de alimentare | 5V |
| Tensiune de alimentare min (vsup) | 4.5V |
| Interfață | I2C, SPI, SSP, UART, USART |
| Dimensiunea memoriei | 14KB |
| Tip oscilator | Extern |
| Curent de aprovizionare nominală | 1.6mA |
| Mărimea RAM | 368 x 8 |
| Tensiune - alimentare (VCC/VDD) | 4V ~ 5.5V |
| UPS/UCS/Tip ICS periferic | Microcontroller, RISC |
| Procesor de bază | Pic |
| Periferice | Detect/Resetare Brown-Out, Por, PWM, WDT |
| Tipul memoriei programului | Bliț |
| Dimensiunea miezului | 8 biți |
| Dimensiunea memoriei programului | 14kb (8k x 14) |
| Conectivitate | I2C, SPI, UART/Usart |
| Dimensiunea bițiului | 8 |
| Timp de acces | 20 µs |
| Are ADC | Da |
| Canale DMA | Nu |
| Lățimea autobuzului de date | 8b |
| Numărul de cronometre/contoare | 3 |
| Adresa lățimii autobuzului | 8b |
| Densitate | 112 kb |
| Dimensiunea EEPROM | 256 x 8 |
| Familia procesorului | Pic |
| Numărul de canale ADC | 8 |
| Numărul de canale PWM | 2 |
| Numărul de canale I2C | 1 |
| Înălţime | 4.06mm |
| Lungime | 52.45mm |
| Lăţime | 14.22mm |
| Ajunge la SVHC | Fără SVHC |
| Întărirea radiațiilor | Nu |
| Starea ROHS | ROHS3 Conform |
| Plumb liber | Plumb liber |
Înțelegerea motoarelor pas cu pas
Un motor pas cu pas este un tip de motor electric care se deplasează în pași specifici, mai degrabă decât în mișcare continuă, precum motoarele tradiționale.Aceste mișcări pas cu pas sunt măsurate în grade, care pot varia în funcție de aplicație.
Motoarele pas cu pas pot funcționa în diferite moduri: unitate de undă, unitate completă și jumătate de unitate.Fiecare mod controlează modul în care sunt alimentate fazele motorului, afectând performanța acestuia și ceea ce îl face adecvat pentru diverse utilizări.
În modul de acționare a valurilor, o singură fază a motorului este alimentată simultan.Acest mod simplu de control este util pentru situațiile în care eficiența puterii este prioritizată peste cuplul, cum ar fi în sarcinile de automatizare de bază, unde este necesar un curent de pornire minim.
Modul de acționare completă alimentează simultan două faze.Acest lucru duce la o ieșire mai mare a cuplului, deoarece două bobine lucrează împreună, ceea ce o face ideală pentru aplicații în care sunt necesare precizie și rezistență, cum ar fi în robotică și utilaje CNC.
Modul de antrenare Half Drive combină atât caracteristicile de undă, cât și ale unității complete, prin alternativ, energizând o fază și două faze.Această abordare oferă dimensiuni mai mici, dublând efectiv rezoluția motorului.Half Drive este cel mai potrivit pentru aplicații precum imprimarea 3D și instrumentarea fină, unde sunt esențiale mișcare lină și poziționare precisă.
Atunci când alegeți un motor pas cu pas pentru o utilizare specifică, luați în considerare mediul de funcționare.Pentru sarcini de înaltă precizie, este recomandat modul Half Drive pentru a asigura tranziții netede și vibrații reduse.Pentru proiectele axate pe economii de energie, modul de acționare a valurilor poate fi mai potrivit.
Selectarea modului potrivit necesită factori de echilibrare, cum ar fi cuplul, viteza și complexitatea sistemului.Alegerea modului corect poate influența semnificativ performanțele motorului și eficiența generală a sistemului dvs.
Conectarea unui motor pas cu pas cu PIC16F877A
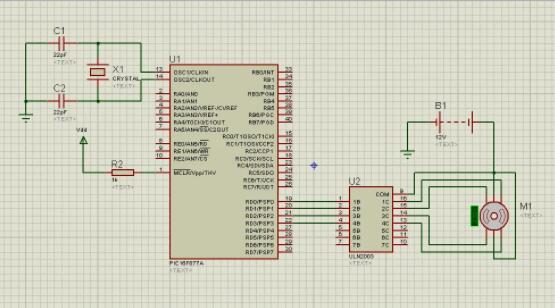
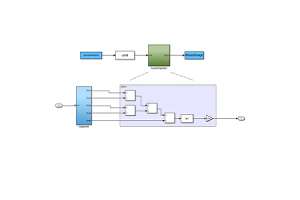
Pentru a conecta un motor pas cu pas cu un PIC16F877A Microcontroller, puteți utiliza tabloul de tranzistor ULN2003.Acest circuit integrat, conceput pentru motoare cu tors ridicat, conține șapte perechi Darlington.Biții de portd inferiori ai microcontrollerului sunt legați de pinii de intrare (1B, 2B, 3B, 4B) din ULN2003, în timp ce pinii săi de ieșire (1C, 2C, 3C, 4C) se conectează la pinii motorului Stepper.Pinii obișnuiți ai motorului și știftul ULN2003 sunt conectate la o sursă de alimentare de 12V.
Motoarele pas cu pas sunt utilizate în mod obișnuit pentru aplicații care necesită un control precis al mișcării.Acestea convertesc impulsurile digitale în rotație mecanică, ceea ce le face ideale pentru dispozitive precum mașinile CNC și imprimantele 3D, unde poziția și viteza trebuie reglate cu atenție.
ULN2003 joacă un rol cheie în controlul motoarelor pas cu pas, datorită capacității sale de a gestiona curentul ridicat și interfața ușoară cu microcontrolerele.Când sunt conectați la PIC16F877A, bițiile de portd inferioare sunt utilizate pentru a controla motorul pas cu pas.Această configurație oferă un control precis al pasului, asigurând mișcarea și poziționarea exactă.
Utilizarea ULN2003 în configurațiile de control al motorului este extrem de fiabilă în aplicațiile din lumea reală.Ajută la minimizarea problemelor precum pașii ratați sau poziționarea incorectă, îmbunătățind performanța generală.Întreținerea și calibrarea regulată pe baza datelor de utilizare pot optimiza și mai mult funcția motorului, asigurând stabilitatea pe termen lung și funcționarea precisă.
Reglarea vitezei motorului pas cu pas
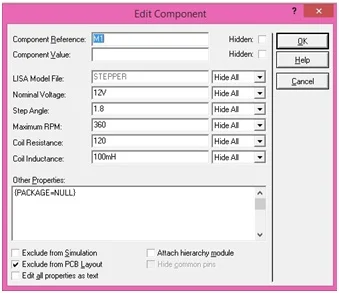
Viteza motorului pas cu pas poate fi modificată cu exactitate folosind software -ul de simulare Proteus.Prin accesarea setărilor motorului prin „Editarea proprietăților”, se pot face ajustări la parametri, cum ar fi numărul de pași și unghiul de pas.De exemplu, un motor de 200 de etape împarte o rotație completă (360 °) în 200 de pași, ceea ce face ca fiecare etapă 1,8 °.Modificarea acestor setări în Proteus va reflecta dinamic în timpul simulării.
În practică, motoarele pas cu pas sunt adesea folosite în industriile în care controlul precis al mișcării este crucial, cum ar fi în mașini CNC și robotică.Reglarea unghiului de pas și numărul de pași reglați motorul pentru a obține mișcarea exactă necesară pentru sarcini specifice.
Modificarea parametrilor motorului pas cu pas afectează caracteristicile de performanță, cum ar fi cuplul și rezoluția.De exemplu, creșterea numărului de pași îmbunătățește în general rezoluția, dar poate avea impact asupra cuplului și a timpului de răspuns.Înțelegerea acestor compromisuri prin simulare ajută la luarea deciziilor informate.
O perspectivă nuanțată dezvăluie că ajustările iterative, urmate de încercări practice, duc la un design mai robust al motorului.Asigurarea că simulările digitale reflectă îndeaproape rezultatele din lumea reală este esențială.Nuanțele de configurare a unui motor pas cu pas constă într -adevăr în ceea ce privește un echilibru între precizia teoretică și fezabilitatea practică.
Programarea unui motor pas cu pas cu PIC16F877A
Această secțiune acoperă modul de programare a unui motor pas cu pas folosind microcontrolerul PIC16F877A, explicând diferite moduri de conducere și oferind îndrumări practice pentru o implementare eficientă.
Iată un cod de exemplu de bază pentru a demonstra controlul motorului pas cu pas folosind modul de acționare complet:
void main ()
{
TRISD = 0B00000000;// setați portd ca ieșire
Portd = 0B111111;// inițializează Portd
do
{
Portd = 0B00000011;// energizează două faze simultan
Întârziere_ms (500);// 0,5 secunde de întârziere
Portd = 0B00000110;
Întârziere_ms (500);
Portd = 0B00001100;
Întârziere_ms (500);
Portd = 0B00001001;
Întârziere_ms (500);
} while (1);// buclă la nesfârșit
}
În acest cod, portul PIC16F877A este configurat ca un port de ieșire pentru a controla motorul pas cu pas prin driverul ULN2003.Secvența comenzilor energizează două faze ale motorului pas cu pas la un moment dat, ceea ce este caracteristic pentru modul de acționare completă.Acest mod ține rotorul într -o poziție fixă cu cuplul maxim, dar de obicei consumă mai multă putere.
Modul de acționare completă nu este singura modalitate de a controla motoarele cu pas.Modurile de unitate de undă și jumătate de acționare oferă alternative bazate pe cerințe specifice.Unitatea de undă energizează o singură fază la un moment dat, ceea ce reduce consumul de energie, dar duce la un cuplu mai mic.Half Drive alternează între una și două faze, oferind o rezoluție mai mare și o mișcare mai netedă.
Când programați Motors Stepper, alegeți modul de conducere care se potrivește cel mai bine nevoilor dvs., fie că este vorba pentru o poziționare precisă, eficiență electrică sau cuplu maxim.
Aplicații practice ale motoarelor pas cu pas
Motoarele pas cu pas sunt utilizate pe scară largă în multe industrii, datorită capacității lor de a oferi un control precis și performanțe fiabile.Versatilitatea lor le face potrivite pentru orice, de la mașini și aparate de uz casnic până la mașini industriale și dispozitive medicale.
În lumea automobilelor, Motors Stepper joacă un rol cheie în controlul sistemelor precum accelerația, farurile și aerul condiționat.Acestea ajută la reglarea acestor componente, asigurându-se că vehiculele funcționează fără probleme și eficient.Între timp, în echipamente de birou, cum ar fi imprimante și fotocopiatori, motoarele pas cu pas gestionează sarcini, cum ar fi alimentarea cu hârtia și plasarea cernelii.Această precizie asigură o calitate a imprimării constantă și o funcționare lină în timp.
Acasă, aparatele precum mașinile de spălat și mașinile de spălat vase se bazează pe motoarele pas cu pas pentru a controla fluxul de apă și rotirea tamburului, asigurând că totul funcționează perfect.În setările industriale, motoarele pas cu pas sunt cruciale pentru operarea mașinilor CNC și a armelor robotizate, unde oferă mișcările exacte necesare pentru fabricarea de înaltă precizie.
De asemenea, sistemele de securitate beneficiază de mișcarea fiabilă a motoarelor pas cu pas.În dispozitive precum camerele de supraveghere și încuietori automatizate, motoarele pas cu pas permit o poziționare netedă și precisă, ceea ce este esențial pentru monitorizarea și securitatea eficientă.În asistența medicală, motoarele pas cu pas sunt utilizate pe dispozitive medicale, cum ar fi pompele de perfuzie și echipamentele imagistice, unde oferă controlul precis necesar pentru o funcționare sigură și precisă.
Pe măsură ce tehnologia continuă să evolueze, se preconizează că Motors Stepper va găsi și mai multe aplicații în câmpuri emergente precum robotică și vehicule autonome.Dezvoltarea lor continuă va duce probabil la o precizie și o eficiență și mai mare, extinzându -și rolul în diverse industrii.
Piese de microcontroller comparabile
| Număr de piesă | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Producător | Tehnologie microcip | Tehnologie microcip | Tehnologie microcip | Tehnologie microcip |
| Pachet / carcasă | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) |
| Numărul de pini | 40 | 40 | 40 | 40 |
| Lățimea autobuzului de date | 8 b | 8 b | 8 b | 8 b |
| Numărul de I/O. | 33 | 33 | 33 | 36 |
| Interfață | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, usart |
| Dimensiunea memoriei | 14 kb | 7 kb | 14 kb | 14 kb |
| Tensiune de alimentare | 5 v | 5 v | 5 v | 5 v |
| Periferice | Detect/Resetare Brown-Out, Por, PWM, WDT | Detect/Resetare Brown-Out, Por, PWM, WDT | Detect/Resetare Brown-Out, Por, PWM, WDT | Detect/Resetare Brown-Out, Por, PWM, WDT |
| Vizualizare comparați | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F74-I/P. | PIC16F877A-I/P. Vs PIC16F777-I/P. |
Întrebări frecvente [FAQ]
1. Ce folosește un motor pas cu pas pentru a genera mișcare mecanică?
Un motor pas cu pas generează mișcare mecanică folosind impulsuri electrice.
2. Ce face un motor pas cu pas?
Un motor pas cu pas se deplasează în trepte discrete.
3. Cum se măsoară motoarele cu pas?
Motoarele pas cu pas sunt măsurate în grade.
4. Câți pași face un motor pas cu pas?
Un motor pas cu pas se mișcă cu un pas la un moment dat.
5. Câte moduri de excitație are un motor pas cu pas?
Un motor pas cu pas are trei moduri de excitație.
6. Care este cel mai simplu mod de a conecta un motor pas cu pas?
Cel mai simplu mod este să -l conectați la un microcontroller PIC16F877A.
7. Câți pini de intrare ale ULN2003 sunt conectate la cele mai mici biți semnificative ale PORTD -ului microcontrollerului?
Patru pini de intrare sunt conectați la cele mai mici bucăți semnificative ale PORTD -ului microcontrolerului
Despre noi
ALLELCO LIMITED
Citeste mai mult
Anchetă rapidă
Vă rugăm să trimiteți o întrebare, vom răspunde imediat.
De ce să alegeți cipul de memorie ADESTO RM25C64DS-LTAI-B pentru proiectul dvs.?
pe 2024/10/10
PC817 Optocoupler: funcționalitate și aplicații moderne
pe 2024/10/10
Postări populare
-

Set de instrucțiuni complexe Calculatoare: Cum au schimbat calculul?
pe 8000/04/18 147749
-

Pinut și caracteristici USB-C
pe 2000/04/18 111898
-
Utilizarea Primitivelor de simulare unificată Xilinx: un ghid cuprinzător pentru proiectarea și simularea FPGA
pe 1600/04/18 111349
-
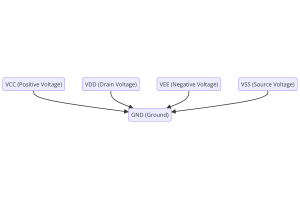
Tensiunile sursei de alimentare în electronică: semnificația VCC, VDD, VEE, VSS și GND
pe 0400/04/18 83713
-

Ghidul conectorului RJ45: PINOUT, cabluri, tipuri de cablu și utilizări
pe 1970/01/1 79502
-
Ghidul final pentru codurile de culori de sârmă în sistemele electrice moderne
Modul în care sistemele noastre electrice folosesc culorile nu este doar pentru aspect.Fiecare culoare de sârmă indică acum o funcție specifică, ceea ce face mai ușor identificarea și gestionarea c...pe 1970/01/1 66866
-

Factor de calitate (Q): ecuații și aplicații
Factorul de calitate, sau „Q”, este important atunci când verificați cât de bine lucrează inductorii și rezonatorii în sisteme electronice care utilizează frecvențe radio (RF).„Q” măsoară cât de bi...pe 1970/01/1 63003
-

Ghid de supapă de purjare: funcție, simptome, testare și înlocuire pentru performanța optimă a motorului
Supapa de purjare este o parte cheie a sistemului unei mașini care ajută la menținerea aerului curat prin gestionarea vaporii de combustibil înainte de a putea scăpa în atmosferă.Acest lucru nu num...pe 1970/01/1 62934
-
Realizarea performanței maxime cu teorema maximă de transfer de putere
Teorema maximă de transfer de putere explică modul în care energia dintr -o sursă, cum ar fi o baterie sau un generator, curge la o sarcină conectată.Arată condiția exactă în care sarcina primește ...pe 1970/01/1 54073
-

Specificații și compatibilitate a bateriei A23
Bateria A23 este o baterie mică, în formă de cilindru, cu tensiune ridicată.De asemenea, numit 23A, 23AE sau MN21, se desfășoară la 12 volți și mult mai mare decât bateriile AA sau AAA.Des...pe 1970/01/1 52087
Număr de piesă fierbinte
-

MAX208ECNG+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/4 24DIP
ADP5022ACBZ-4-R7
Analog Devices Inc.
IC REG TRPL BCK/LNR SYNC 16WLCSP
DS1217A-64K-25
Analog Devices Inc./Maxim Integrated
MODULE NVRAM 8KB 250NS CARTRIDGE
AD5744RCSUZ
Analog Devices Inc.
IC DAC 14BIT V-OUT 32TQFP
TLC7528CNS
Texas Instruments
IC DAC 8BIT A-OUT 20SO
06035A910JAT2A
KYOCERA AVX
CAP CER 91PF 50V NP0 0603
FAN4800AUN
onsemi
IC PFC CTR AV CURR 268KHZ 16DIP
RR264MM-400TR
Rohm Semiconductor
DIODE GEN PURP 400V 1A PMDU
TMP106YZCT
Texas Instruments
SENSOR DIGITAL -40C-125C 6DSBGA
MCT06030C1002FP500
Electro-Films (EFI) / Vishay
RES SMD 10K OHM 1% 1/8W 0603
DMN6068LK3Q-13
Diodes Incorporated
MOSFET BVDSS: 41V 60V TO252
ADS7845E/2K5G4
Texas Instruments
IC SCREEN CNTRL 12BIT 16SSOP
XC4005E-3PQ100I
AMD
IC FPGA 77 I/O 100QFP
1812HC821KAT3A\SB
KYOCERA AVX
CAP CER 820PF 3KV X7R 1812
NRVTS12100PFST3G
onsemi
DIODE SCHOTTKY 100V 12A TO277-3
6N135-500E
Broadcom Limited
OPTOISO 3.75KV TRANS W/BASE 8SMD
MAX333AEUP+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 4 45OHM 20TSSOP
LFB212G45CG1C187
Murata Electronics
RF-D -

SC1565IST18TRT
Semtech Corporation
IC REG LINEAR 1.8V 1.5A SOT223-3
AD5220BN10
Analog Devices Inc.
IC POT DGTL 10K 128POS 8-DIP
LM2904AVQPWRG4
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8TSSOP
BTF3125EJXUMA1
Infineon Technologies
IC PWR SWITCH N-CHAN 1:1 TDSO-8
744773115
Würth Elektronik
FIXED IND 15UH 1.2A 235 MOHM SMD
LP2981AIM5X-2.9
Texas Instruments
IC REG LINEAR FIXED LDO REG
1808SC102MAJ1A
KYOCERA AVX
CAP CER 1000PF 1.5KV X7R 1808
DS89C420-MNL
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT 16KB FLASH 40DIP
STP16DPS05MTR
STMicroelectronics
IC LED DRIVER LINEAR 100MA 24SO
VC060305A150DP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
CSD16410Q5A
Texas Instruments
MOSFET N-CH 25V 16A/59A 8VSON
HAL1000UT-K
TDK-Micronas GmbH
MAGNETIC SWITCH PROG TO92UT
SI1403BDL-T1-GE3
Vishay Siliconix
MOSFET P-CH 20V 1.5A SC70-6
AD7999YRJZ-1500RL7
Analog Devices Inc.
IC ADC 8BIT SAR SOT23-8
EP2A15B724C7
Intel
IC FPGA 492 I/O 724BGA
SN74AHC138RGYR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16VQFN
PIC16F627A-I/SS
Microchip Technology
IC MCU 8BIT 1.75KB FLASH 20SSOP
MAX98307ETE+T
Analog Devices Inc./Maxim Integrated
IC AMP CLASS DG MONO 3.3W 16TQFN -

AOB290L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 100V 18A/140A TO263
MAX13433EETD+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 1/1 14TDFN
SN74LVC112ADR
Texas Instruments
IC FF JK TYPE DUAL 1BIT 16SOIC
ATSAM4SD32BA-MU
Microchip Technology
IC MCU 32BIT 2MB FLASH 64QFN
CL31A106KPHNNNF
Samsung Electro-Mechanics
CAP CER 10UF 10V X5R 1206
SOLC-120-02-F-Q-A
Samtec Inc.
CONN RCPT 80POS 0.05 GOLD SMD
UPW1J101MPD
Nichicon
CAP ALUM 100UF 20% 63V RADIAL
CS5532-BSZR
Cirrus Logic Inc.
IC ADC 24BIT SIGMA-DELTA 20SSOP
CC0603GRNPO9BN120
YAGEO
CAP CER 12PF 50V C0G/NPO 0603
S-812C50AMC-C3ET2G
ABLIC Inc.
IC REG LINEAR 5V 75MA SOT23-5
C3216X8R1H684M160AE
TDK Corporation
CAP CER 0.68UF 50V X8R 1206
CY2309NZSC-1HT
Cypress Semiconductor Corp
IC CLK BUF 1:9 133.3MHZ 16SOIC
FDD6632
Fairchild Semiconductor
MOSFET N-CH 30V 9A DPAK
GCM155R71E473KA55D
Murata Electronics
CAP CER 0.047UF 25V X7R 0402
LM2743MTCX
Texas Instruments
IC REG CTRLR BUCK 14TSSOP
7440650047
Würth Elektronik
FIXED IND 4.7UH 4.6A 23 MOHM SMD
SS2P4HM3/84A
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V 2A DO220AA
V24C12H100BS
Vicor Corporation
DC DC CONVERTER 12V 100W