Introducere în sistemele de control: funcționare, tipuri și aplicații
Utilizați sisteme de control ori de câte ori o mașină menține automat o valoare constantă, cum ar fi temperatura, viteza sau nivelul.Acest articol explică ce este un sistem de control, cum funcționează împreună părțile sale și cum feedback-ul menține ieșirea corectă.Veți vedea, de asemenea, principalele tipuri de sisteme și modul în care acestea se comportă în funcțiune.Sunt incluse utilizări comune, beneficii și limite.Catalog
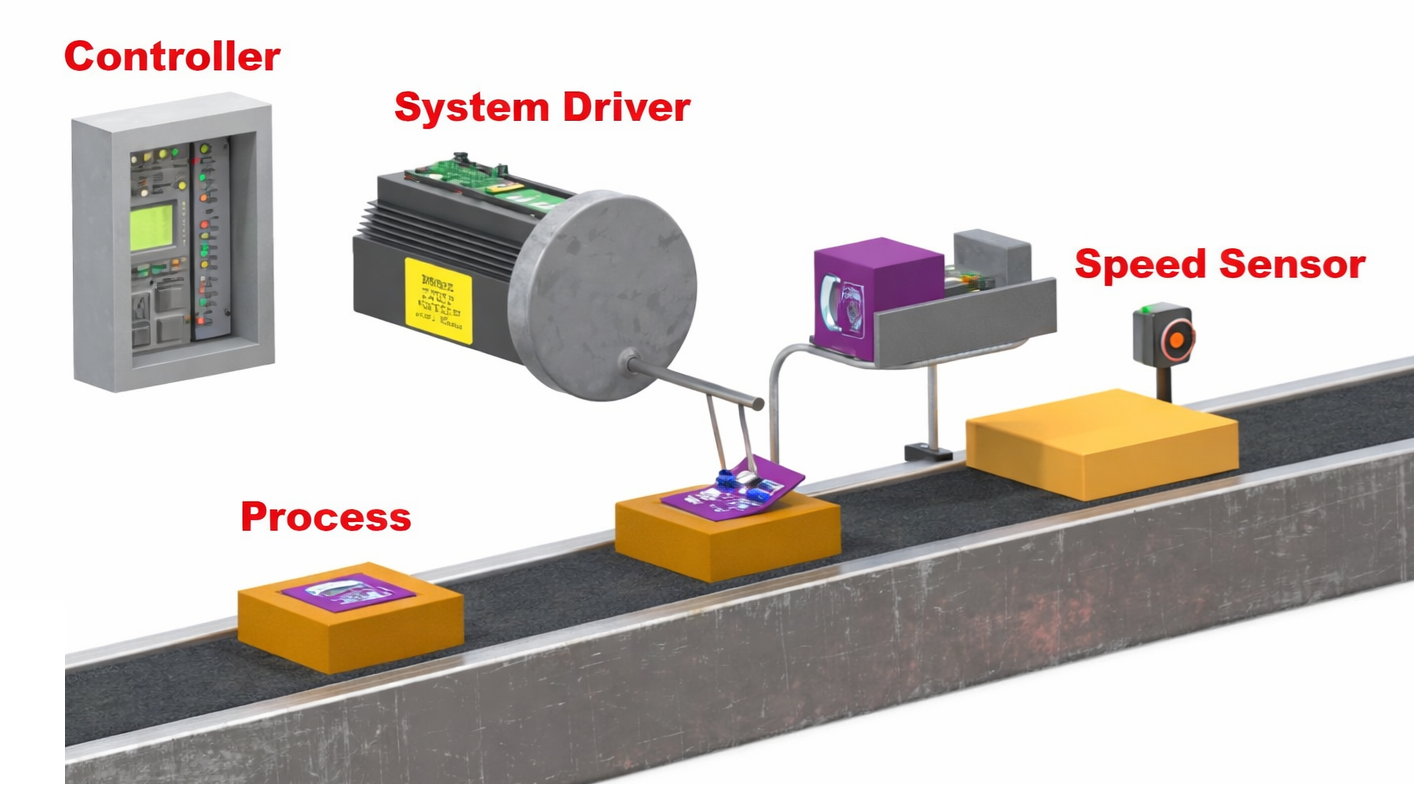
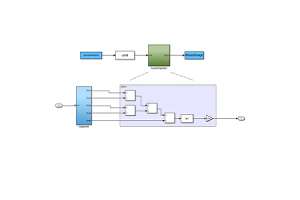
Figura 1. Exemplu de sistem de control
Ce este un sistem de control?
Un sistem de control este un sistem care menține o valoare măsurată aproape de o valoare țintă dorită.Scopul său este de a ajusta automat un proces, astfel încât rezultatul să rămână corect chiar și atunci când condițiile se schimbă.De exemplu, un termostat de cameră menține temperatura aproape de nivelul setat, iar un automat de croazieră menține vehiculul la o viteză selectată.Un controler de nivel al rezervorului de apă menține, de asemenea, înălțimea apei la un punct ales.În termeni simpli, un sistem de control verifică și corectează continuu o variabilă pentru a se potrivi cu valoarea cerută.
Elementele de bază ale unui sistem de control
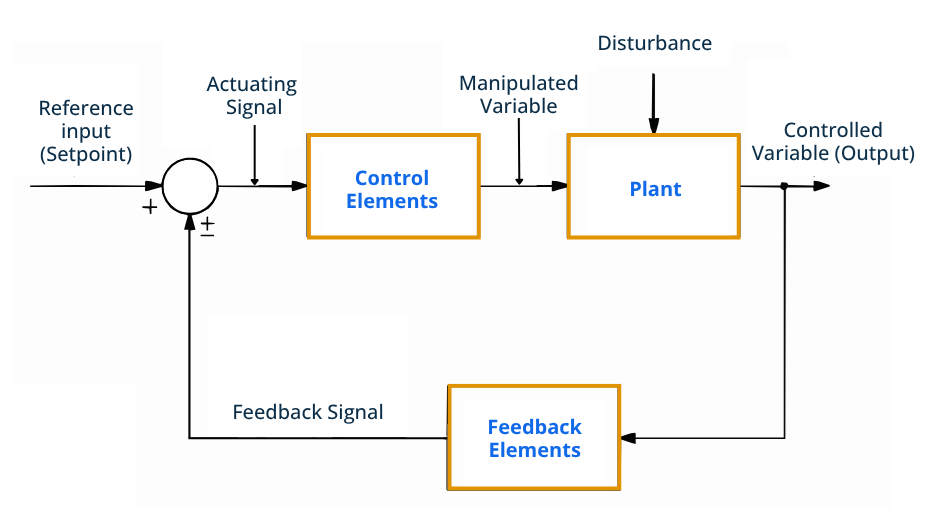
Figura 2. Diagrama bloc al sistemului de control
Un sistem de control este alcătuit din mai multe părți standard, fiecare executând o sarcină specifică.
• Intrare referință (punct de referință)
Aceasta este valoarea dorită pe care sistemul încearcă să o mențină.Reprezintă condiția țintă selectată.Sistemul compară întotdeauna valoarea reală cu această referință.
• Semnal de acționare
Acesta este semnalul produs după compararea valorilor dorite și reale.Reprezintă cât de multă ajustare este necesară.Semnalul pregătește sistemul pentru corecție.
• Elemente de control
Aceste părți se ocupă de procesul de luare a deciziilor.Ele determină acțiunea corectivă pe baza semnalului primit.Rezultatele din această etapă pregătesc procesul pentru ajustare.
• Variabilă manipulată
Aceasta este cantitatea ajustabilă trimisă către proces.Modificarea acestei valori influențează rezultatul final.Este variabila pe care sistemul o poate varia direct.
• Planta
Planta este procesul controlat.Acesta produce valoarea finală de ieșire.Sistemul urmărește să mențină această ieșire la nivelul dorit.
• Perturbare
Aceasta este o schimbare nedorită care afectează procesul.Poate împinge ieșirea departe de valoarea dorită.Sistemul trebuie să compenseze.
• Variabilă controlată (ieșire)
Acesta este rezultatul real măsurat al procesului.Acesta arată starea actuală a sistemului.Scopul este de a-l menține egal cu intrarea de referință.
• Elemente de feedback
Acestea măsoară producția și trimit informații înapoi pentru verificare.Ele furnizează sistemului starea actuală.Acest lucru permite stabilirea corectării.
• Semnal de feedback
Acestea sunt informațiile returnate despre valoarea de ieșire.Reprezintă starea procesului.Sistemul îl folosește pentru comparație.
Principiul de funcționare al sistemului de control
Figura 3. Principiul de funcționare al sistemului de control
Principiul de funcționare al unui sistem de control începe cu o valoare de intrare dorită fiind dată sistemului.Apoi, sistemul compară această valoare cu valoarea reală de ieșire.Diferența dintre ele se numește semnal de eroare.Dacă eroarea există, sistemul generează un semnal de corecție.Această corecție ajustează procesul pentru a reduce eroarea.Ieșirea se modifică și este verificată din nou continuu.Ciclul se repetă până când ieșirea se potrivește îndeaproape cu valoarea dorită.
Caracteristicile sistemelor de control
Sistemele de control sunt evaluate în funcție de cât de bine funcționează în timpul funcționării.Aceste caracteristici descriu calitatea și fiabilitatea răspunsului sistemului.
|
Caracteristici |
Descriere |
|
Stabilitate |
Ieșirea face
nu diverge;revine la valoarea constantă după perturbare |
|
Precizie |
Eroare finală ≤
±2–5% din valoarea setată |
|
Precizie |
Ieșire
variație ≤ ±1% sub aceeași intrare |
|
Timp de răspuns
|
Inițial
reacția are loc în timpul de întârziere măsurat (td) |
|
Timpul de creștere |
Timp de la 10%
la 90% din valoarea finală |
|
Timp de stabilire |
Intră și
rămâne în intervalul de ±2%. |
|
Depășire |
Vârful depășește
valoarea finală cu % suma |
|
Stare de echilibru
Eroare |
Constant
compensarea rămasă după stabilizare |
|
Sensibilitate |
ΔIeșire /
Rata de modificare a parametrilor Δ |
|
Robustitate |
Mentine
funcționare în ciuda schimbării perturbației |
|
Lățimea de bandă |
Funcționează
efectiv până la -3 dB frecvență de tăiere |
|
Repetabilitate |
Aceeași intrare
produce aceeași ieșire în limitele toleranței |
|
Fiabilitate |
Funcționează
fără defecțiuni pentru timpul de funcționare nominal (MTBF) |
|
amortizare |
Oscilatie
dezintegrare determinată de raportul de amortizare ζ |
|
Viteza de
Răspuns |
Timp total pentru
ajunge la o stare stabilă |
Tipuri de sisteme de control
Sistemele de control sunt clasificate în funcție de modul în care gestionează informațiile, semnalele și comportamentul de răspuns.Ele sunt grupate în funcție de utilizarea feedback-ului, forma semnalului și comportamentul matematic.
Sistem de control în buclă deschisă
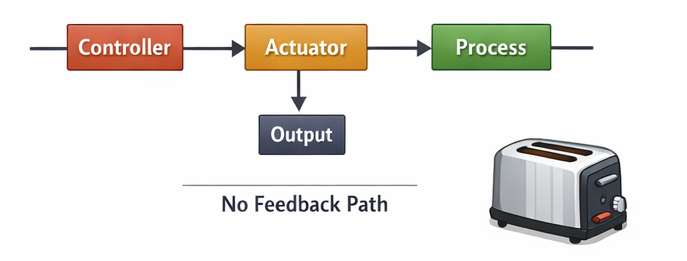
Figura 4. Diagrama sistemului de control în buclă deschisă
Un sistem de control în buclă deschisă este un sistem în care ieșirea nu influențează acțiunea de control.Sistemul trimite o comandă și presupune că rezultatul este corect fără a-l verifica.Deoarece nu există o cale de feedback, acesta nu poate corecta automat erorile sau perturbațiile.Performanța depinde în principal de calibrarea adecvată și de condițiile de funcționare.Aceste sisteme sunt simple, ieftine și ușor de proiectat.Cu toate acestea, modificările de încărcare sau de mediu pot afecta rezultatul final.Exemplele obișnuite includ un cronometru pentru prăjitor de pâine electric, controlul cronometrului mașinii de spălat și un temporizator fix de irigare.
Sistem de control în buclă închisă
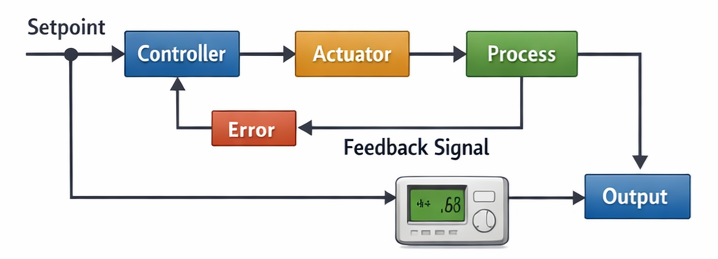
Figura 5. Diagrama sistemului de control în buclă închisă
Un sistem de control în buclă închisă este un sistem care folosește feedback pentru a-și ajusta automat ieșirea.Sistemul măsoară rezultatul și îl compară cu valoarea dorită.Dacă apare o diferență, se aplică o corecție pentru a reduce eroarea.Această reglare continuă permite o funcționare precisă și stabilă chiar și atunci când condițiile variază.Sistemele cu buclă închisă oferă o mai bună precizie și fiabilitate decât sistemele cu buclă deschisă.Sunt utilizate pe scară largă în aplicațiile moderne de control automat.Exemplele tipice includ controlul temperaturii aparatului de aer condiționat, controlul vitezei de croazieră a vehiculului și regulatoarele automate de tensiune.
Sistem de control în timp continuu
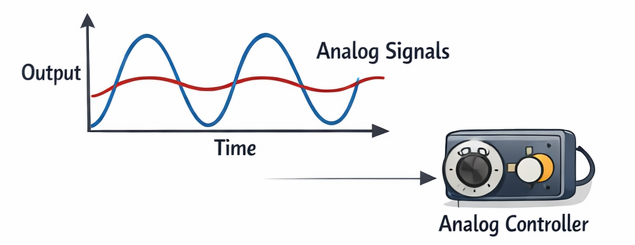
Figura 6. Semnal de control în timp continuu (analogic).
Un sistem de control în timp continuu procesează semnale care se modifică fără probleme în timp.Intrarea și ieșirea există în fiecare moment fără întrerupere.Aceste sisteme funcționează de obicei cu semnale electrice sau mecanice analogice.Deoarece semnalele sunt continue, răspunsul este, de asemenea, lin și natural.Sistemele cu timp continuu se găsesc în mod obișnuit în controlerele analogice tradiționale.Sunt potrivite pentru procese fizice care necesită o reacție imediată.Exemplele includ regulatoare analogice de viteză, controlul volumului amplificatorului audio și controlul poziției supapelor hidraulice.
Sistem de control în timp discret
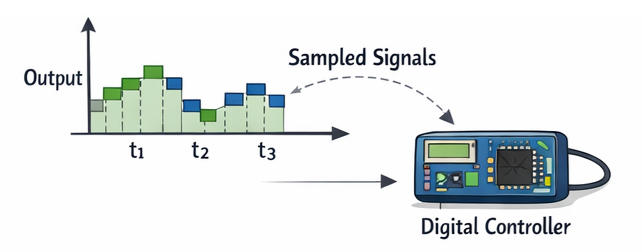
Figura 7. Semnal de control în timp discret (digital).
Un sistem de control în timp discret funcționează folosind semnale de date eșantionate.Sistemul verifică și actualizează valorile numai la anumite intervale de timp.Aceste semnale sunt de obicei procesate de controlere digitale sau microprocesoare.Ieșirea se modifică pas cu pas, mai degrabă decât continuu.Astfel de sisteme permit funcționarea programabilă și reglarea flexibilă.Sunt utilizate pe scară largă în controlul electronic modern și bazat pe computer.Exemplele includ controlul temperaturii bazat pe microcontroler, controlul digital al vitezei motorului și termostate inteligente pentru casă.
Sistem de control liniar

Figura 8. Relația de intrare-ieșire a sistemului liniar
Un sistem de control liniar urmează o relație proporțională între intrare și ieșire.Dacă intrarea se dublează, și ieșirea se dublează în aceleași condiții.Aceste sisteme satisfac principiul suprapunerii în care intrările combinate produc ieșiri combinate.Comportamentul liniar permite o analiză matematică previzibilă și ușoară.Cele mai multe modele teoretice de control presupun o funcționare liniară pentru simplitate.Modelele liniare ajută la proiectarea sistemelor stabile și precise.Exemplele includ amplificatoare electronice cu semnal mic și regiuni de control al motorului cu sarcină mică.
Sistem de control neliniar
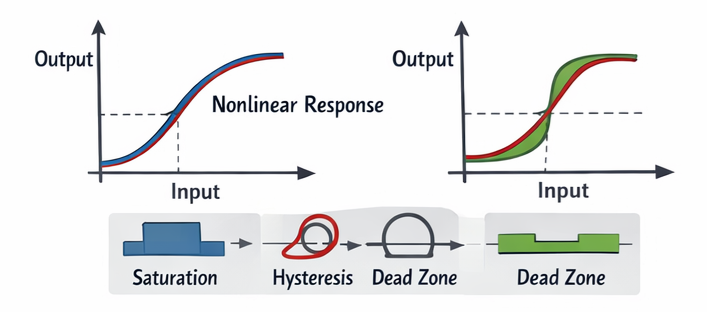
Figura 9. Caracteristicile răspunsului sistemului neliniar
Un sistem de control neliniar are o ieșire care nu este proporțională cu intrarea.Răspunsul se modifică în funcție de domeniul sau condițiile de funcționare.Modificările mici ale intrărilor pot produce variații mari de ieșire sau nicio modificare.Apar adesea efecte precum saturația, histerezisul și zonele moarte.Aceste sisteme sunt mai greu de analizat, dar reprezintă procesele fizice mai precis.Multe sisteme se comportă în mod natural într-un mod neliniar.Exemplele includ limitele de mișcare a brațului robotizat, comportamentul actuatorului magnetic și controlul debitului supapei în poziții extreme.
Avantajele și dezavantajele sistemelor de control
Sistemele de control îmbunătățesc consistența și reduc efortul manual, dar introduc și complexitate și costuri.
Avantajele sistemelor de control
• Sistemul menține ieșirea aproape de valoarea necesară în timpul funcționării.
• Operatorii nu trebuie să continue să regleze echipamentul manual.
• Mașinile pot funcționa ore lungi fără opriri frecvente.
• Sistemul corectează automat modificările condiţiilor.
• Starea de funcționare poate fi verificată de pe un panou sau de pe un afișaj de la distanță.
Dezavantajele sistemelor de control
• Costul de instalare este mai mare decât sistemele manuale simple.
• Sunt necesari muncitori calificați pentru instalare și service.
• Senzorii și piesele electronice se pot defecta în timp.
• Găsirea cauzei problemelor poate dura mai mult.
• Sistemul depinde de o putere electrică stabilă.
Aplicații ale sistemelor de control
Sistemele de control sunt utilizate atât în automatizarea industrială, cât și în echipamentele de zi cu zi pentru a menține automat funcționarea corectă.
1. Fabricație industrială
Mașinile de producție mențin dimensiunile și calitatea constantă a produsului.Liniile de asamblare automate folosesc reglementări pentru a asigura repetabilitatea.Acest lucru reduce risipa și îmbunătățește eficiența.
2. Reglarea temperaturii
Echipamentele de încălzire și răcire mențin condiții de mediu confortabile.Clădirile se bazează pe reglarea automată pentru a stabiliza climatul interior.Acest lucru îmbunătățește eficiența energetică și confortul.
3. Sisteme de transport
Vehiculele folosesc controlul vitezei și stabilității pentru o funcționare mai lină.Mașinile moderne includ controlul vitezei de croazieră și sistemele de tracțiune.Acestea îmbunătățesc siguranța la conducere și performanța.
4. Sisteme de alimentare
Rețelele electrice reglează nivelurile de tensiune și frecvență.Generatoarele ajustează puterea pentru a se potrivi cu cererea de sarcină.Acest lucru asigură o alimentare stabilă cu energie electrică.
5. Robotică și automatizare
Roboții efectuează sarcini precise de poziționare și mișcare.Mașinile automate funcționează continuu cu precizie ridicată.Acest lucru permite producția avansată.
6. Echipamente medicale
Dispozitivele mențin condiții de funcționare controlate în timpul tratamentului.Echipamentele de monitorizare mențin valorile în limite de siguranță.Acest lucru îmbunătățește siguranța și fiabilitatea pacientului.
7. Electrocasnice
Dispozitivele de zi cu zi gestionează automat setările de operare.Mașinile de spălat și frigiderele mențin condiții corespunzătoare de funcționare.Acest lucru simplifică sarcinile zilnice.
8. Sisteme aerospațiale
Avioanele și dronele mențin condiții de zbor stabile.Ghidarea automată păstrează orientarea și altitudinea corecte.Acest lucru sprijină navigarea fiabilă.
Sistem de control vs automatizare vs sisteme încorporate
Aceste tehnologii sunt strâns legate, dar servesc diferitelor scopuri de inginerie în cadrul produselor electronice și industriale moderne.
|
Caracteristică |
Control
Sistem |
Automatizare |
Încorporat
Sistem |
|
Focus principal |
Regulamentul de
variabile |
Proces
executarea |
Dispozitiv
operare |
|
Scop |
Menține
valoarea dorită |
Efectuați sarcini
automat |
Alergați dedicat
funcții |
|
Domeniul de aplicare |
Specific
comportamentul procesului |
Întreg
fluxul de lucru
|
singur
dispozitivul produsului |
|
Decizie
Capacitate |
Bazat pe
valorile măsurate |
Bazat pe
logica programata |
Bazat pe
firmware |
|
Utilizare feedback |
Adesea
necesar |
Opțional |
Opțional |
|
Tip hardware |
Senzori și
actuatoare |
Mașini și
controlorii |
Microcontroler
bord |
|
Rolul software |
Calculul
și corectare |
Secvențierea
si coordonare |
Dispozitiv
logica de control |
|
Tip de răspuns |
Continuă
ajustare |
Sarcină
executarea |
Funcționare funcțională |
|
Dimensiunea sistemului |
Mic pentru
mediu |
Mediu la
mare |
Foarte mic |
|
Flexibilitate |
Moderat |
Înalt |
Limitat |
|
timpul
Cerință |
Înalt |
Moderat |
Înalt |
|
Aplicație
Nivel |
Nivelul procesului |
Nivelul plantei |
Nivel de produs |
|
Exemplu |
Temperatura
control |
Fabrica
linie de producție |
Ceas inteligent |
|
Integrarea |
O parte din
automatizare |
Conține
sisteme de control |
Suporta ambele |
Concluzie
Sistemele de control mențin stabilitatea comparând continuu ieșirea reală cu o valoare țintă și corectând orice eroare.Performanța lor depinde de elementele de bază, cum ar fi feedback-ul, acțiunea controlerului și procesul controlat.Diferite clasificări definesc modul în care sunt tratate semnalele și cât de precis un sistem răspunde la perturbări.Datorită acestor capacități, sistemele de control sunt aplicate pe scară largă în industrie, transport, energie, dispozitive medicale și echipamente de zi cu zi.
Despre noi
ALLELCO LIMITED
Citeste mai mult
Anchetă rapidă
Vă rugăm să trimiteți o întrebare, vom răspunde imediat.
întrebări frecvente [FAQ]
1. Care este diferența dintre un controler și un sistem de control?
Un controler este doar dispozitivul de luare a deciziilor (cum ar fi un controler PLC sau PID).Un sistem de control include controlerul plus senzori, actuatoare și procesul care este reglat.
2. Ce este controlul PID și de ce este important?
Controlul PID utilizează acțiuni proporționale, integrale și derivate pentru a minimiza erorile rapid și fără probleme.Îmbunătățește stabilitatea, acuratețea și viteza de răspuns în majoritatea sistemelor industriale.
3. De ce sistemele de control uneori oscilează sau vânează?
Oscilația apare atunci când corecțiile sunt prea agresive sau întârziate.Reglajul slab, senzorii lenți sau câștigul excesiv determină depășirea în mod repetat a ieșirii.
4. Ce este saturația actuatorului?
Saturația actuatorului are loc atunci când actuatorul atinge limita fizică și nu poate crește în continuare puterea.Acest lucru împiedică sistemul să corecteze erori mari.
5. Cum gestionează sistemele de control întârzierile în procese?
Ei folosesc metode de reglare, filtre sau algoritmi predictivi pentru a compensa decalajul, astfel încât corecția să aibă loc la momentul potrivit.

Ghid pentru rezistență de 4,7 kΩ: cod de culoare, utilizări, testare și comparație de valori
pe 2026/02/16
Întrerupător miniatural (MCB): Principiu de funcționare, Tipuri, Evaluări și Ghid de selecție
pe 2026/02/15
Postări populare
-

Set de instrucțiuni complexe Calculatoare: Cum au schimbat calculul?
pe 8000/04/18 147772
-

Pinut și caracteristici USB-C
pe 2000/04/18 112009
-
Utilizarea Primitivelor de simulare unificată Xilinx: un ghid cuprinzător pentru proiectarea și simularea FPGA
pe 1600/04/18 111351
-
Tensiunile sursei de alimentare în electronică: semnificația VCC, VDD, VEE, VSS și GND
pe 0400/04/18 83768
-

Ghidul conectorului RJ45: PINOUT, cabluri, tipuri de cablu și utilizări
pe 1970/01/1 79565
-
Ghidul final pentru codurile de culori de sârmă în sistemele electrice moderne
Modul în care sistemele noastre electrice folosesc culorile nu este doar pentru aspect.Fiecare culoare de sârmă indică acum o funcție specifică, ceea ce face mai ușor identificarea și gestionarea c...pe 1970/01/1 66960
-

Ghid de supapă de purjare: funcție, simptome, testare și înlocuire pentru performanța optimă a motorului
Supapa de purjare este o parte cheie a sistemului unei mașini care ajută la menținerea aerului curat prin gestionarea vaporii de combustibil înainte de a putea scăpa în atmosferă.Acest lucru nu num...pe 1970/01/1 63100
-

Factor de calitate (Q): ecuații și aplicații
Factorul de calitate, sau „Q”, este important atunci când verificați cât de bine lucrează inductorii și rezonatorii în sisteme electronice care utilizează frecvențe radio (RF).„Q” măsoară cât de bi...pe 1970/01/1 63040
-
Realizarea performanței maxime cu teorema maximă de transfer de putere
Teorema maximă de transfer de putere explică modul în care energia dintr -o sursă, cum ar fi o baterie sau un generator, curge la o sarcină conectată.Arată condiția exactă în care sarcina primește ...pe 1970/01/1 54097
-

Specificații și compatibilitate a bateriei A23
Bateria A23 este o baterie mică, în formă de cilindru, cu tensiune ridicată.De asemenea, numit 23A, 23AE sau MN21, se desfășoară la 12 volți și mult mai mare decât bateriile AA sau AAA.Des...pe 1970/01/1 52184
Număr de piesă fierbinte
-
MC9S08AC96CLKE
Freescale Semiconductor
IC MCU 8BIT 96KB FLASH 80LQFP
LNK458KG-TL
Power Integrations
IC LED DRVR OFFL TRIAC 1A 12ESOP
06031C332KAT7A
KYOCERA AVX
CAP CER 3300PF 100V X7R 0603
MC9S08DV16ACLF
NXP USA Inc.
IC MCU 8BIT 16KB FLASH 48LQFP
87CNQ020ASM
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 20V D618SM
1.5SMC36CA
Littelfuse Inc.
TVS DIODE 30.8VWM 49.9VC DO214AB
SN74AHC595QPWRQ1
Texas Instruments
IC SHIFT REGISTER SGL 8B 16TSSOP
SN74LVC2G86YZPR
Texas Instruments
IC GATE XOR 2CH 2-INP 8DSBGA
ST3222EBPR
STMicroelectronics
IC TRANSCEIVER FULL 2/2 20SSOP
TL431IDBVR
Texas Instruments
IC VREF SHUNT ADJ 2.2% SOT23-5
ESH2PC-E3/84A
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 150V 2A DO220AA
EN6382QI
Intel
DC DC CONVERTER 0.6-5.9V
20CJQ060TR
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 60V SOT223
AOT264L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 60V 19A/140A TO220
TLV9151SIDBVR
Texas Instruments
IC OPAMP GP 1 CIRCUIT SOT23-6
TLE4275S
Infineon Technologies
IC REG LIN 5V 450MA TO220-5-12
ADE7752ARZ
Analog Devices Inc.
IC ENERGY METERING DETEC 24-SOIC
AQV414SZ
Panasonic Electric Works
SSR RELAY SPST-NC 100MA 0-400V -

IS42S81600F-6TL
ISSI, Integrated Silicon Solution Inc
IC DRAM 128MBIT PAR 54TSOP II
ICL3226ECAZ
Renesas Electronics America Inc
IC TRANSCEIVER FULL 1/1 16SSOP
LQM2HPN1R0MJCL
Murata Electronics
FIXED IND 1UH 1.5A 108 MOHM SMD
GRM1885C1H682JA01J
Murata Electronics
CAP CER 6800PF 50V C0G/NP0 0603
TDA7498ETR
STMicroelectronics
IC AMP D MONO/STER 220W PWRSSO36
06033A121KAT4A
KYOCERA AVX
CAP CER 120PF 25V C0G/NP0 0603
VI-2TM-CY
Vicor Corporation
DC DC CONVERTER 10V 50W
AT86RF233-ZUR
Microchip Technology
IC RF TXRX+MCU 802.15.4 32VFQFN
87520-3S10BPLF
Amphenol ICC (FCI)
CONN RCPT USB2.0 TYPEA 4POS R/A
GCM2165C1H121JA16D
Murata Electronics
CAP CER 120PF 50V C0G/NP0 0805
MAX4657ESA
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NCX1 10OHM 8SOIC
LT1011AIS8#PBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 8SO
GRM0336T1E9R0DD01D
Murata Electronics
CAP CER 9PF 25V T2H 0201
SSL-LXA228GC-TR31
Lumex Opto/Components Inc.
LED GREEN CLEAR Z-BEND SMD
LMK316BJ335MD-T
Taiyo Yuden
CAP CER 3.3UF 10V X5R 1206
APT8014JLL
Microchip Technology
MOSFET N-CH 800V 42A ISOTOP
VJ0603Y471JXXCW1BC
Vishay Vitramon
CAP CER 470PF 25V X7R 0603
SBT-0260
KEMET
CMC 60UH 500MA 2LN TH -

AC0603KRX7R8BB105
YAGEO
CAP CER 1UF 25V X7R 0603
12101C105M4T4A
AVX Corporation
CAP CER 1UF 100V X7R 1210
MR25H40CDC
Everspin Technologies Inc.
IC RAM 4MBIT SPI 40MHZ 8DFN
C1608JB0J156M080AC
TDK Corporation
CAP CER 15UF 6.3V JB 0603
MAX499CWG
Analog Devices Inc./Maxim Integrated
IC BUFF/AMP RGB SPDT 24-SOIC
MMSZ5254BS-7-F
Diodes Incorporated
DIODE ZENER 27V 200MW SOD323
SN74CBT16244CDGGR
Texas Instruments
IC BUS SWITCH 4 X 1:1 48TSSOP
DAC0832LCN
Texas Instruments
IC DAC 8BIT A-OUT 20DIP
08055U3R0DAT2A
KYOCERA AVX
CAP CER 3PF 50V NP0 0805
SN74HC257ANSR
Texas Instruments
IC MULTIPLEXER 4 X 2:1 16SO
MIC5245-3.1BM5
Micrel Inc.
IC REG LINEAR MICROCAP CMOS LDO
LAA127LSTR
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 170MA 0-250V
VE-230-CW
Vicor Corporation
DC DC CONVERTER 5V 100W
SN74AXC4T245BQBR
Texas Instruments
IC TRANSCEIVER HALF 4/4 16WQFN
CGA5L2X5R1H684M160AA
TDK Corporation
CAP CER 0.68UF 50V X5R 1206
MDD95-12N1B
IXYS
DIODE MODULE 1.2KV 120A TO240AA
SRR1260A-100M
Bourns Inc.
FIXED IND 10UH 5.5A 20 MOHM SMD
1206ZC225KAZ2A
KYOCERA AVX
CAP CER 2.2UF 10V X7R 1206